FLL City Shaper - Challenge Update για την χρήση χάρακα (Jig)
Ανακοινώθηκε από την First το τελευταίο update σχετικά με την χρήση πλαισίου-χάρακα (jig) κατά την εκκίνηση του robot στο robot game
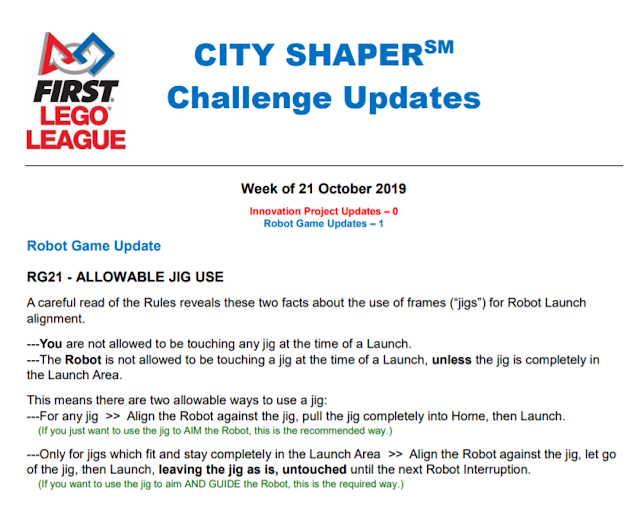

Σύμφωνα με αυτό, μια προσεκτική ανάγνωση των κανόνων, αποκαλύπτει δύο δεδομένα για την χρήση πλαισίων - χαράκων (jigs) για την ευθυγράμμιση του robot κατά την εκκίνηση.
- Δεν επιτρέπεται να ακουμπάμε κανένα χάρακα - πλαίσιο κατά τον χρόνο Εκκίνησης
- Το robot δεν επιτρέπεται να ακουμπάει ένα πλαίσιο - χάρακα κατά την εκκίνηση, εκτός αν ο χάρακας - πλαίσιο είναι τελείως μέσα στην περιοχή εκκίνησης ( Launch area)
Αυτό σημαίνει ότι υπάρχουν μόνο δύο επιτρεπόμενοι τρόποι για να χρησιμοποιήσουμε ένα χάρακα-πλαίσιο (jig)
- Για οποιοδήποτε πλαίσιο - χάρακα (jig) : Ευθυγραμμίσουμε το robot με την χρήση του πλαισίου-χάρακα, τραβάμε το πλαίσιο στο Home και μετά ξεκινάμε το robot - Launch. (Αν θέλουμε να χρησιμοποιήσουμε το χάρακα για να στοχεύσουμε το robot, αυτός είναι ο ενδεδειγμένος τρόπος)
- Μόνο για πλαίσια - χάρακες (jigs) που χωράνε και μένουν εντελώς μέσα στην Launch Area : Ευθυγραμμίζουμε το robot σε σχέση με τον χάρακα, αφήνουμε τον χάρακα, εκκινούμε το robot αφήνοντας τον χάρακα όπως είναι στην θέση που είναι χωρίς να τον ακουμπήσουμε μέχρι την επόμενη επαφή με το robot . (Αν θέλουμε να χρησιμοποιήσουμε το χάρακα για να στοχεύσουμε και να κατευθύνουμε το robot , αυτός είναι ο απαιτούμενος τρόπος)
Μπορείτε να δείτε το τελευταίο update από εδώ


Comments
Post a Comment